
I software rappresentano la chiave d’accesso al mondo dei cobot e il loro costante sviluppo permette di integrare celle robotiche nelle produzioni con sempre maggiore semplicità, anche a operatori senza formazione specifica.
Tra le evoluzioni più importanti segnaliamo la versione 2.0 del plugin URcap, sviluppata dal nostro partner Pick-it che l’ha raccontata (in inglese) in un approfondimento dedicato da cui nasce questo post.
Il software, rilasciato nel corso del 2020, rende l’integrazione dei sistemi di visione 3D per robot con i bracci Universal Robots ancora più semplice e veloce.
Grazie al nuovo plugin di Pick-it, infatti, non è più necessario saper scrivere del codice di programmazione e verificarne il funzionamento, perché queste operazioni vengono gestite in autonomia dal software URcap.
Per configurare la presa da un’area di oggetti, anche di diverse dimensioni e sparsi alla rinfusa, e il loro posizionamento in un punto di rilascio specificato, con questo nuovo software bastano infatti 4 semplici operazioni:
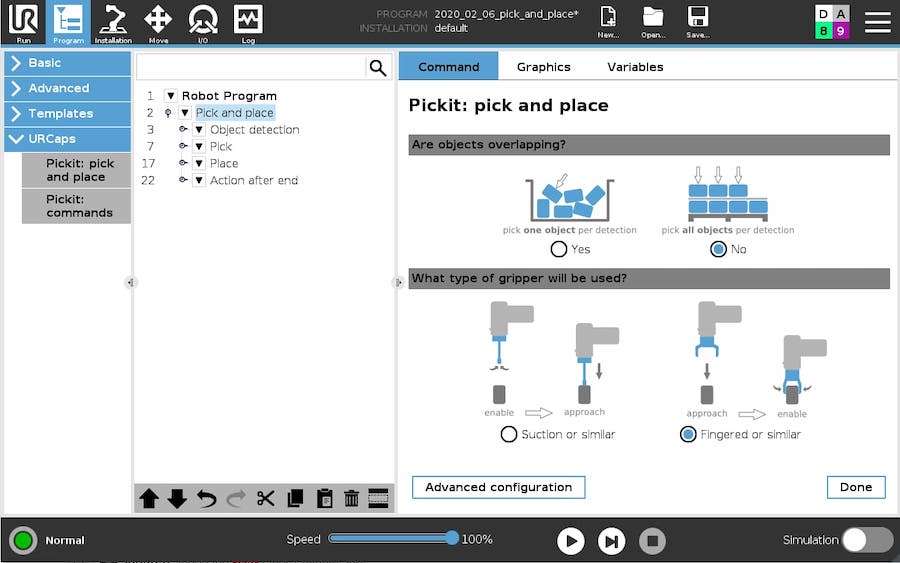
- Rispondere alle 2 sole domande proposte dal terminale e relative all’applicazione che si desidera andare a realizzare. Nella schermata è possibile indicare se fornire una o più coordinate di presa per ogni scatto: quando le parti sono sovrapposte alla rinfusa, si indica una coordinata per ogni scatto; quando invece le parti sono disposte ordinatamente in una matrice si indicano più coordinate per singolo scatto. Inoltre viene richiesto di indicare quale tipo di pinza si utilizza, scegliendo tra quelle a vuoto (con presa dall’alto) o uno dei vari modelli che permettono la presa ai lati del singolo pezzo
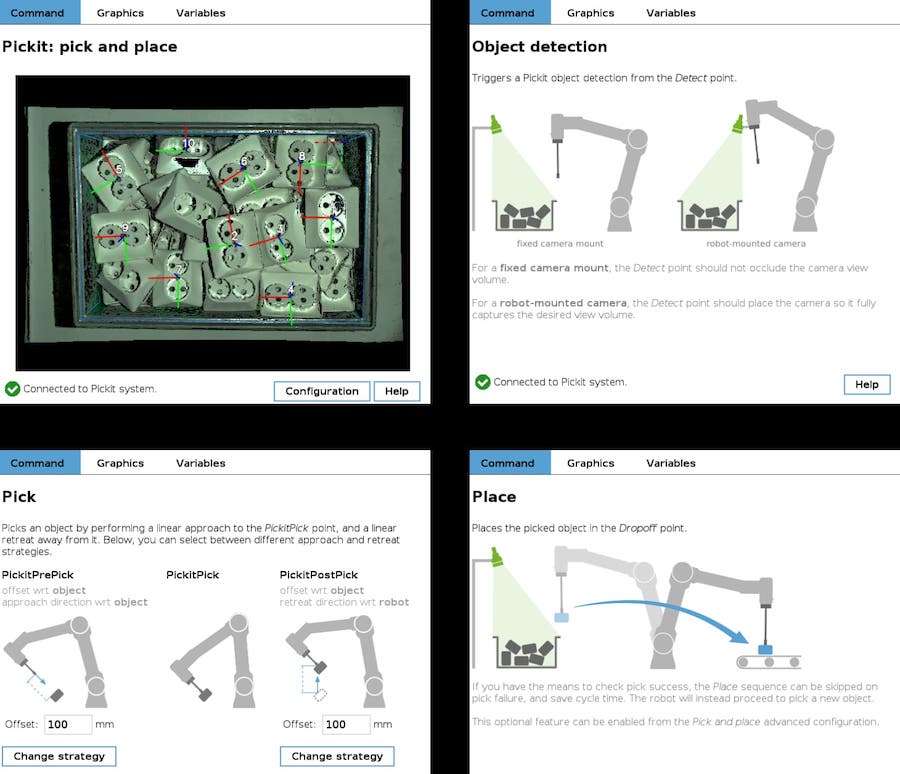
- Selezionare, tra quelle disponibili, la configurazione per l’attività desiderata, indicando se si usa una camera fissa o al polso
- Indicare le coordinate di 3 soli punti del percorso che il braccio robotico dovrà realizzare: il punto di presa, quello di rilascio e il tipo di approccio che unisce questi due
- Impostare le azioni di presa e di rilascio dell’oggetto da movimentare
Il software guida la programmazione anche attraverso degli indicatori visivi, come il colore giallo per segnalare l’esistenza di parametri mancanti e non ancora configurati.
Ulteriori indicazioni per l’integrazione sono disponibili nell’approfondimento dedicato da Pick-it a queste particolari applicazioni.
Completate queste poche operazioni preliminari che richiedono pochi minuti solo alla prima configurazione, il software si occupa di tutto il resto: l’applicazione così impostata è subito pronta per iniziare a lavorare.
Resta comunque prevista la possibilità di intervenire in un secondo momento sulla configurazione per perfezionare il percorso che è stato impostato.
Anche il collegamento del sistema di visione si fa semplicissimo con il plugin 2.0 sviluppato da Pick-it per Universal Robots, che è in grado di rilevare automaticamente la presenza di un sistema di visione 3D all’interno della cella robotica (che può essere installato sia in posizione fissa che agganciato al polso del braccio robotico) e di completarne la configurazione in autonomia.
Inoltre il plugin : in questo modo non è più indispensabile fare riferimento anche a Polyscope, l’interfaccia di programmazione dei bracci robotici Universal Robots, per avere sotto controllo tutta la situazione.
Il modello sviluppato da Pick-it con questo nuovo plugin rende più semplice e snella l’esperienza di configurazione dei sistemi di presa e posizionamento (pick and place) degli oggetti, indipendentemente dalle dimensioni dell’applicazione che è necessario andare a sviluppare.
Con l’ausilio del nuovo plugin Pick-it per URcap che semplifica la programmazione, gli operatori possono impostare facilmente e in poco tempo l’applicazione per metterla subito in funzione e trarne tutti i benefici.