Programmare i robot collaborativi Universal Robots è semplice. Lo abbiamo detto più volte nel nostro blog e nei nostri canali social. Lo si vede anche nel video tutorial che abbiamo realizzato per voi.
In questo filmato è possibile vedere quanto sia effettivamente user friendly l’interfaccia di programmazione dei cobot UR.
Programmare un Robot UR, come iniziare
Nel video tutorial abbiamo realizzato un programma base per far muovere il cobot tra due punti stabiliti.
Dal menù esterno del pannello touch screen, scegliamo il pulsante con la dicitura “programma robot”. Nel menù successivo scegliamo la voce: “programma vuoto”.
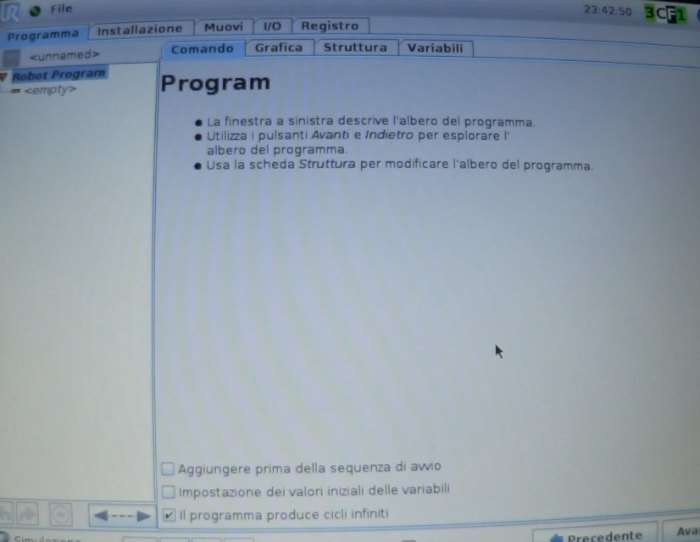
A questo punto ci troviamo di fronte a una schermata divisa in 2 parti. Sulla sinistra un’area bianca che conterrà il programma con le istruzioni scelte. Sulla destra una serie di schede nelle quali poter selezionare le varie istruzioni da importare nel programma. Le varie schede ci permettono di configurare le singole opzioni delle istruzioni scelte.
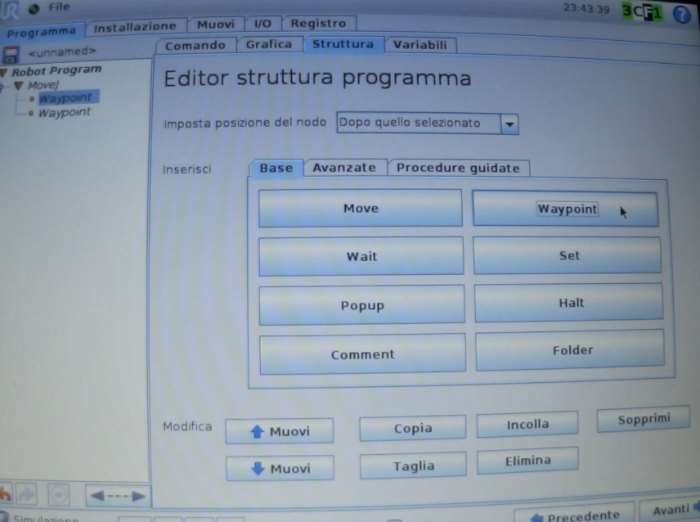
Per inserire un’istruzione di movimento, scegliamo la scheda “struttura” e l’istruzione “muovi” o “move”. Premendo il pulsante “move” visualizzeremo sulla sinistra movej (o spostaJ) con un punto proposto al di sotto dell’istruzione stessa. Per aggiungere un altro punto, dovremo premere il tasto “waypoint” (o punto percorso), a destra del precedente tasto premuto (muovi).
Premendo “waypoint” inseriremo un altro punto al di sotto di quello fatto apparire in precedenza.
Programmare un Robot UR, come muovere il robot
A questo punto dobbiamo istruire il robot affinchè raggiunga i punti che desideriamo. Selezioniamo uno dei due punti (waypoint) sulla sinistra, selezioniamo la scheda “comando” e premiamo il pulsante ben visibile al centro dello schermo “imposta questo punto”. Una volta premuto compare la schermata di movimento.
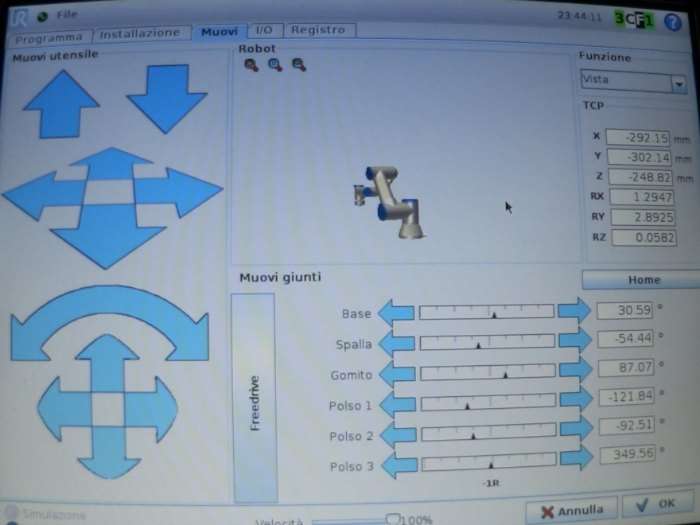
A questo punto possiamo muovere il cobot,
- sia utilizzando le frecce sul display a sinistra del pannello
- sia agendo manualmente, spostando il braccio antropomorfo come desideriamo
Per muoverlo manualmente è necessario premere il pulsante posto sul retro del pannello, mettendolo così in modalità free drive.

Quindi portiamo il robot, trascinando il braccio meccanico manualmente, in un punto che vogliamo. Premiamo ok per dare la conferma e fare in modo che il sistema memorizzi il comando ricevuto.
Arrivati sin qui, giunge il momento della selezione del secondo “punto percorso” del robot, pertanto si ripetono i passaggi precedenti:
- Si preme il secondo waypoint,
- imposta questo punto,
- pulsante fisico sul pannello,
- si mette in modalità freedrive,
- si posiziona il robot nel secondo punto del percorso,
- si rilascia il pulsante fisico,
- si conferma e il programma è completato.
Per farlo partire basta premere il tasto “play”, successivamente il tasto “auto”. I pulsanti non sono più attivi, diventando grigi. Un’altra conferma con “ok” e il robot inizia il movimento che abbiamo stabilito.
Per non perdervi i video tutorial che pubblichiamo sul nostro canale Youtube, iscrivetevi seguendo questo indirizzo.