Alumotion è stata presente anche alla nuova fiera di riferimento per la meccatronica che, pur essendo alla sua sola prima edizione ha ospitato 180 imprese espositrici, di cui il 30% straniero, su una superficie di 8000mq.
Come sempre vogliamo stare al confine delle nuove tecnologie e spingerci sempre più avanti nell’anticipare quelli che saranno gli sviluppi futuri nel campo della robotica di servizio.
E’ ormai palese che il tema della cooperazione uomo-robot è tra i più caldi e per questo, grazie allo sviluppo effettuato dai ricercatori di ITIA-CNR Milano abbiamo presentato alcuni prototipi di futuri sviluppi nell’ambito della collaborazione uomo-robot.
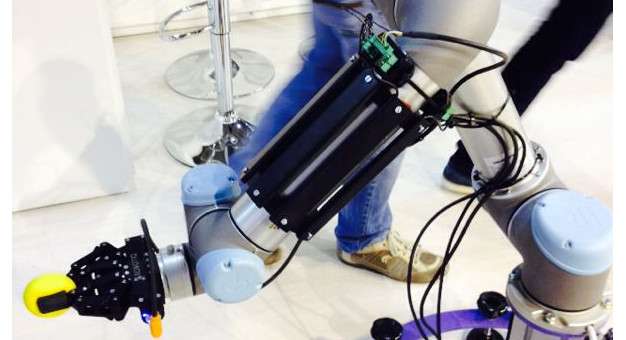
Il primo importante progetto riguarda una particolare “gabbia” che integra sensori di prossimità in grado di evitare le collisioni del braccio robotico con qualsiasi oggetto e naturalmente anche con operatori. In tal modo, nonostante il nostro Universal Robots sia già di tipo collaborativo, si incrementano ulteriormente le performance in termini di sicurezza del robot. Il sensore anticollisione può essere prodotto con diverse forme e geometrie così da poter essere montato in posizioni differenti sul braccio robotico.
Particolare utilità di tale sensore si rivela in scopi di protezione dell’organo di presa (tipicamente una pinza) che tipicamente può essere pericoloso e di tipo non collaborativo. L’utilizzo di un sistema anticollisione abbinato ad un robot collaborativo rende l’intero sistema in grado di cooperare in sicurezza con l’operatore.
[youtube id=”ALzZtqvZ3Uc” width=”560″ height=”315″]
Il secondo progetto presentato consiste nella possibilità di comandare il robot con semplici gesti di una mano con l’obiettivo di migliorare l’interfaccia uomo macchina. Uno speciale sensore “leap motion” è in grado di rilevare le gestures di una mano e delle singole dita e riportare le coordinate al robot.
In tal modo il braccio robotico è in grado di seguire fedelmente i movimenti della mano umana evitando all’operatore anche meno esperto di doversi preoccupare dell’interfaccia di programmazione del robot.
Il sensore “leap motion” si collega ad un sistema PC tramite interfaccia USB ed integra telecamere ad infrarossi in grado di rilevare la posizione di 10 dita nello spazio fino ad 1mt di distanza. La particolarità sta nell’utilizzo di solo il 2% delle risorse CPU essendo però fino a 100 volte più preciso di un sensore Kinect.
[youtube id=”3HDpHqbjJdE” width=”560″ height=”315″]
La tecnologia Leap nasce per l’utilizzo di applicativi con personal computer e al fine di migliorare l’interazione dell’utente con i software stessi. Applicazioni tipiche sono con sistemi CAD, grafica, giochi e non solo…
L’innovazione sta infatti nell’utilizzo di tale tecnologia nel mondo dell’industria, in particolare della robotica. Una possibile applicazione oltre al tracking di una mano consiste nel memorizzare gestures tipiche (ad es. mostrando il numero 1-2-3 con le dita) in grado di lanciare diversi movimenti del robot.
L’operatore quindi senza nemmeno toccare l’interfaccia di programmazione del robot sarà in grado di eseguire diversi programmi e movimenti semplicemente mostrando con le dita il numero prescelto…. Niente male vero?