Le esigenze dell’industria farmaceutica stanno andando incontro a una trasformazione: se in passato (anche recente) è stata privilegiata una produzione “di massa”, oggi che la diagnostica si è evoluta nella direzione di una personalizzazione sempre più spinta delle cure la medicina ha bisogno di produzioni versatili, capaci di realizzare piccoli lotti di prodotto (ed il relativo imballaggio) e che possano essere rapidamente riconvertite.
In questo senso, in virtù delle sue peculiarità la robotica collaborativa può essere di grande aiuto nel fornire la risposta ogni volta più adatta a un mercato che ha esigenze sempre nuove e differenti.
Dall’altra parte, l’automatizzazione della produzione farmaceutica può andare incontro ad alcune criticità: se infatti riempire scatole rettangolari o blister di compresse può risultare piuttosto semplice, gestire con un processo standard degli oggetti di forme particolari come, ad esempio, le siringhe, comporta un grado di complessità maggiore e richiede soluzioni specifiche.
In questo caso i sistemi di visione si rivelano di grande aiuto, grazie alla loro capacità di rilevare correttamente il materiale e guidare la presa e la movimentazione da parte del braccio robotico.
Esemplare in questo senso è l’esperienza che ha visto coinvolto il nostro partner Pick-it con i suoi sistemi di visione automatica in 3D all’interno di un’importante fabbrica di medicinali.
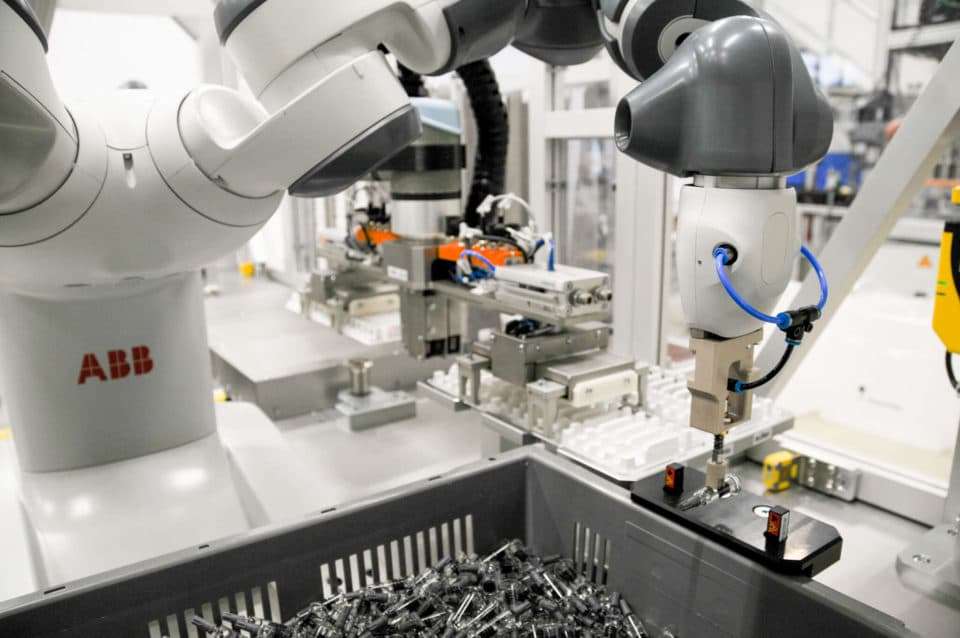
Il processo che il cliente doveva gestire prevede la presa di siringhe da una cesta, in cui sono posizionate in gran numero alla rinfusa, e il loro trasferimento all’interno dei blister con cui saranno commercializzate.
Tra gli aspetti più complessi da gestire in questa particolare applicazione c’è la struttura delle siringhe, che essendo trasparenti possono risultare più difficili da rilevare da parte di un sistema di visione automatica: la visione 3D supera questa complessità.
Essa infatti consente di rilevare correttamente le forme anche quando sono inserite alla rinfusa all’interno di un contenitore, localizzare i singoli pezzi e inviarne le coordinate al robot, selezionare l’oggetto che in quel particolare momento è più comodo da prendere (andando a individuarlo tra quelli posti in superficie anziché sotto nella scatola) e indicare i punti di prelievo più idonei per la presa della siringa.
Tutta questa attività grazie al sistema di visione 3D e alla particolare configurazione della cella robotica viene svolta ad altissima velocità e senza il ricorso all’attività ripetitiva (e per questo più soggetta a errore) di un operatore, che esonerato dalla mansione può dedicarsi ad altre più complesse ad alto valore aggiunto.
Il ciclo si compone di 4 fasi diverse:
il rilevamento del materiale
Il sensore integrato nella fotocamera del sistema di visione Pick-it acquisisce immagini in 3D del materiale da lavorare, anche quando deve fare i conti con oggetti dalla forma irregolare (proprio come le siringhe). Il materiale può anche essere disposto alla rinfusa, come in questo caso specifico, all’interno di una cesta.
il robot
Le immagini acquisite vengono trasmesse al robot, che attraverso di esse conosce le coordinate degli oggetti e, grazie a un apposito software sviluppato da Pick-it, è in grado di selezionare di volta in volta solo il pezzo che si trova nella miglior posizione di presa (ossia il più vicino in superficie, senza andare a scavare alla rinfusa).
la presa
In questa specifica applicazione si è scelto di ricorrere a una pinza di aspirazione a vuoto in modo che le siringhe potessero essere prese in maniera sicura senza il rischio di rovinare il materiale. Questa è solo una delle diverse possibilità disponibili.
la gestione del vassoio
Le siringhe vengono spostate nel punto in cui devono essere posizionate in ordine: nel caso specifico, all’interno delle confezioni con cui verranno commercializzate.
Per automatizzare ulteriormente l’applicazione, l’azienda che ha sviluppato questa cella robotica l’ha completata con delle stazioni in grado di gestire anche la movimentazione delle confezioni una volta che sono state riempite: in questo modo la cella può continuare l’attività in autonomia per parecchio tempo.
Il sistema che funziona in maniera tanto efficace con le siringhe, come dimostra il video che condividiamo qui, può successivamente essere riconvertito e impiegato per altri oggetti di altre forme, in seguito a una semplice e rapida riconfigurazione delle impostazioni di rilevamento che si fa
Il robot collaborativo, i suoi end effector e il sistema di visione che guida le attività di presa e movimentazione dei pezzi possono essere poi reimpiegati così come si fa con gli utensili più comuni, per assolvere ad altre funzioni e attività senza bisogno di sostenere nuovamente l’investimento iniziale necessario per dotarsi di un sistema che automatizza la produzione.