

Pinze per l’automazione robotica: come scegliere?
In uno dei nostri articoli abbiamo descritto nei minimi dettagli le caratteristiche e le qualità di una pinza di precisione, accennando al movimento traslatorio della Hand-E.
In questo post entreremo più nei dettagli, per capire cos’è una pinza parallela di precisione e quali sono le differenze con una pinza parallela adattiva.
Davanti alla vasta scelta che il mercato offre, viene naturale chiedersi quale pinza utilizzare con un robot collaborativo rispetto alle esigenze imposte dall’applicazione che si desidera automatizzare. Vediamo quindi quali sono le differenze tra le due tipologie.
Che cos’è una pinza adattiva?
Tutte le pinze adattive della Robotiq consentono ai robot di afferrare una vasta gamma di oggetti, senza nemmeno la necessità di effettuare di volta in volta un cambio pinze. In ogni caso, la pinza adattiva (nello specifico la 2F-85 e la 2F-140) ha la capacità di adattarsi alla forma dell’oggetto, garantendo una presa sicura senza la necessità di personalizzazioni alle punte della pinza.
La flessibilità delle dita è data dal meccanismo di collegamento parallelo. Questo fantastico (e brevettato!) progetto meccanico permette alle estremità della pinza di rimanere parallele quando effettuano la presa e permette loro di ruotare attorno agli oggetti per una presa che circondi l’oggetto. Le pinze 2 dita e 3 dita di Robotiq hanno segnato una svolta nel mercato dei robot collaborativi, se così si può dire. Dato che la loro flessibilità deriva da rigidi collegamenti paralleli, esse hanno anche una forza di presa più elevata rispetto ad altre pinze adattive, fatte di un materiale più flessibile per adattare la loro forma attorno agli oggetti.
Che cos’è una pinza di precisione?
Questa tipologia di pinza parallela permette al robot di afferrare con precisione degli oggetti entro una stretta gamma di dimensioni: generalmente ha un’apertura ridotta (intesa come la distanza tra la pinza completamente aperta e chiusa), tanto che la maggior parte delle pinze sul mercato hanno un’apertura inferiore ai 50mm.

Le dita di questa pinza rimangono parallele durante l’intero svolgimento dell’operazione, mentre la tipologia adattiva segue un percorso leggermente curvo durante la chiusura. Questa è una delle ragioni per cui questa tipologia è perfetta per i compiti di alta precisione. Un’altra ragione è che la Hand-E è stata progettata con una tolleranza molto bassa, cosa che contribuisce a migliorarne l’accuratezza.
Uno dei grandi vantaggi offerti dalla Hand-e è la possibilità di sostituire in modo molto semplice le sue estremità, cosa che vi consente di ridisegnarle e renderle perfettamente compatibili con l’applicazione da voi desiderata. D’altro canto questo potrebbe divenire anche uno svantaggio qualora restringesse la loro adattabilità nello svolgere mansioni differenti. In passato molte pinze venivano fornite senza punte, dando solo il blocco di attuazione. Robotiq ha evitato questo problema fornendo la Hand-E con un paio di dita multifunzionali, adattabili per la maggior parte delle applicazioni comuni.
La maggior parte delle pinze parallele attualmente in vendita sono ad attivazione pneumatica. Sebbene in passato le pinze pneumatiche presentassero dei vantaggi, le moderne pinze elettriche riescono a raggiungere gli stessi livelli di performance senza però presentare i loro difetti. La Hand-E per esempio è una pinza elettrica dalle alte prestazioni.
Pinza adattiva VS pinza di precisione: la sfida finale
È tempo dello scontro finale: compariamo i due tipi di pinza per vedere come se la cavano l’una contro l’altra. Qui di seguito riportiamo le proprietà a confronto:
– ampiezza dell’apertura: come dicevamo, si tratta della distanza tra la posizione della pinza completamente aperta e chiusa. Essa non limita necessariamente la larghezza massima degli oggetti che si possono afferrare, dato che l’aggiunta di altre estremità consente di prendere anche parti più larghe;
– margine: questo è lo spazio necessario alla pinza per entrare nella zona di lavoro. Potete visualizzarlo come il minimo diametro di un tubo in cui la pinza riesce ad infilarsi;
– precisione: è il livello di accuratezza con cui la pinza manipola gli oggetti. Tutte le pinze Robotiq vengono fornite con un sistema di localizzazione integrato, che vi consente di capire quando un oggetto è stato preso, pertanto questa caratteristica fa riferimento anche alla precisione del rilevamento oggetti;
– forza massima di presa: è la forza massima che la pinza può applicare ad un oggetto. Delle estremità personalizzate più lunghe riducono la forza massima, quindi questa deve essere ricalcolata per ogni personalizzazione realizzata;
– condizioni ambientali: la presenza di polvere o liquidi nell’ambiente di lavoro è una considerazione importante da fare per alcune applicazioni. Alcune pinze hanno maggior livello di protezione rispetto ad altre;
– personalizzazione: tutte le pinze Robotiq hanno come opzione quella di poterle personalizzare con le estremità da voi scelte, ma la Hand-E si adatta particolarmente a questa customizzazione;
– guida manuale: uno dei maggiori vantaggi dei robot collaborativi è che potete programmarli semplicemente spostandoli fisicamente da un punto a un altro. Alcune pinze sono più facili da afferrare di altre, cosa che facilita la guida manuale.
Diamo quindi un’occhiata alle differenze in numeri:
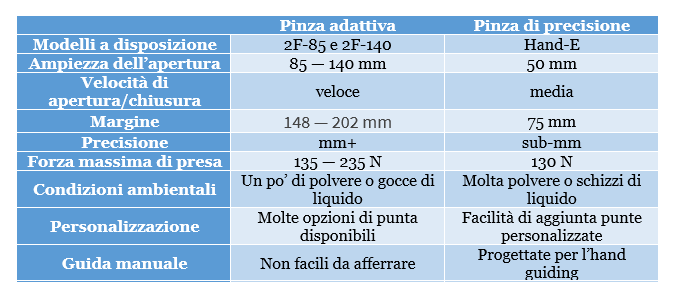
È chiaro che entrambi i tipi di pinza hanno i loro punti di forza: la pinza adattiva possiede un’apertura ampia e un’alta forza di presa, ma necessita di margini ampi e non è molto precisa; la pinza di precisione ha un margine ristretto, una precisione decimale e una buona protezione dall’ambiente di lavoro, ma la sua forza di presa non è molto alta. Nessuna delle opzioni sembra quindi migliore dell’altra nelle categorie esaminate.
Quale pinza è la migliore per la vostra applicazione?
Quando considerate una pinza la domanda non dovrebbe mai essere ‘quale è la migliore?’. Invece la questione dovrebbe essere ‘qual è la migliore per la mia applicazione?’.
Prima di tutto avete bisogno di essere sicuri in merito alle necessità imposte dalla vostra applicazione. Se non lo avete ancora fatto, esaminate i dettagli del compito che volete automatizzare e poi chiedetevi:
– qual è l’oggetto più largo che il robot dovrà prendere?
– qual è il movimento di cui avrà bisogno il robot?
– i margini sono un problema?
– quanto deve essere precisa la pinza?
– quanta forza deve essere in grado di imprimere il robot ad un oggetto?
– quanta polvere o liquido c’è nell’ambiente di lavoro?
– sono necessarie punte personalizzate per il compito?
– l’hand-guiding è un elemento di importante?
Se aveste ulteriori domande in merito a quale pinza fa al caso vostro, contattateci: il nostro team è a vostra disposizione!





